ロボット
tag:rbt.jisw.com,2016://18
2007-09-01T03:46:17Z
ロボットの種類-学習用,産業用,掃除,2足歩行,溶接,知能,機械工学など
Movable Type 3.21-ja
図記号
tag:rbt.jisw.com,2007://18.4009
2007-09-01T02:37:36Z
2007-09-01T03:46:17Z
産業用ロボット-図記号(JIS B 0138)における産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号について。
jisw
http://www.jisw.com/
産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号について規定しているJIS規格には、”JIS B 0138 産業用ロボット-図記号”があります。
その適用範囲、分類、記号(図記号)については以下の通りになります。
1.適用範囲
この規格は、産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号について規定する。
2.分類
分類は、次による。
(1)図記号表示の基本
(2)機構を表す図記号
(3)座標系に関する文字記号
3.記号
3.1 図記号
図記号は、表1 及び 表2によるほか、次による。
(1)図記号は、図を読み取るために明りょう、かつ、読みやすい大きさで表示する。
(2)この規格に規定していない機器又はシステムは、これらの記号を組み合わせて表示することができる。
3.2 座標系に関する文字記号
座標系に関する文字記号は、表3 による。
表1 図記号表示の基本(以下の番号1〜6)
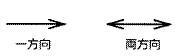
番号:1
名称:直進の方向
図記号:(以下)
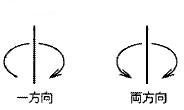
 番号:2
名称:回転の方向
図記号:(以下)
番号:2
名称:回転の方向
図記号:(以下)
 番号:3
名称:ジョイント軸、バー(リンク)
図記号:(以下)
番号:3
名称:ジョイント軸、バー(リンク)
図記号:(以下)
 番号:4
名称:リンクの固定結合
図記号:(以下)
番号:4
名称:リンクの固定結合
図記号:(以下)
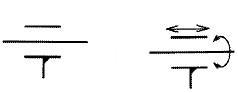
 番号:5
名称:設置基準面
図記号:(以下)
番号:5
名称:設置基準面
図記号:(以下)
 番号:6
名称:メカニカルインタフェース
図記号:(以下)
番号:6
名称:メカニカルインタフェース
図記号:(以下)
 表2 機構を表す図記号(以下の番号1〜8)
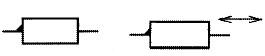
番号:1
名称:直進ジョイント(1)
自由度:1
図記号と運動の方向:(以下)
表2 機構を表す図記号(以下の番号1〜8)
番号:1
名称:直進ジョイント(1)
自由度:1
図記号と運動の方向:(以下)
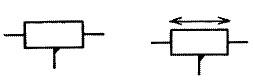 番号:2
名称:直進ジョイント(2)
自由度:1
図記号と運動の方向:(以下)
番号:2
名称:直進ジョイント(2)
自由度:1
図記号と運動の方向:(以下)
 番号:3
名称:回転ジョイント(1)
自由度:1
図記号と運動の方向:(以下)
番号:3
名称:回転ジョイント(1)
自由度:1
図記号と運動の方向:(以下)
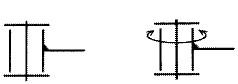
 番号:4
名称:回転ジョイント(2)(平面)
自由度:1
図記号と運動の方向:(以下)
番号:4
名称:回転ジョイント(2)(平面)
自由度:1
図記号と運動の方向:(以下)
 番号:5
名称:回転ジョイント(2)(立体)
自由度:1
図記号と運動の方向:(以下)
番号:5
名称:回転ジョイント(2)(立体)
自由度:1
図記号と運動の方向:(以下)
 番号:6
名称:円筒ジョイント
自由度:2
図記号と運動の方向:(以下)
番号:6
名称:円筒ジョイント
自由度:2
図記号と運動の方向:(以下)
 番号:7
名称:球ジョイント
自由度:3
図記号と運動の方向:(以下)
番号:7
名称:球ジョイント
自由度:3
図記号と運動の方向:(以下)
 番号:8
名称:エンドエフェクタ
自由度:−
図記号:(以下)
番号:8
名称:エンドエフェクタ
自由度:−
図記号:(以下)
 表3 座標系に関する文字記号(以下の番号1〜6)
番号:1
名称(座標系):座標系(一般的表示)
文字記号:X、Y、Z
番号2
名称(座標系):ワールド座標系
文字記号:X0、Y0、Z0
番号:3
名称(座標系):ベース座標系
文字記号:X1、Y1、Z1
番号:4
名称(座標系):メカニカルインタフェース座標系
文字記号:Xm、Ym、Zm
番号:5
名称(ロボットの運動):X、Y、Z軸方向の並進運動
文字記号:X、Y、Z / x、y、z
番号:6
名称(ロボットの運動):X、Y、Z軸周りの単独の回転運動
文字記号:A、B、C
参考
記号の使用例:
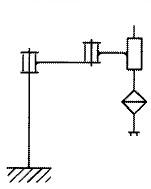
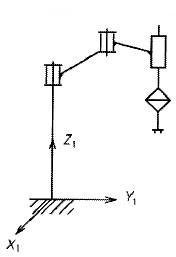
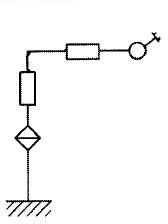
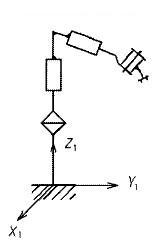
表1 及び 表2 で定めた図記号を組み合わせて産業用ロボットを表示した例を示す。
立体的表現を分かりやすくするために、座標系を付けることもある(例4、例6、例7)。
表3 座標系に関する文字記号(以下の番号1〜6)
番号:1
名称(座標系):座標系(一般的表示)
文字記号:X、Y、Z
番号2
名称(座標系):ワールド座標系
文字記号:X0、Y0、Z0
番号:3
名称(座標系):ベース座標系
文字記号:X1、Y1、Z1
番号:4
名称(座標系):メカニカルインタフェース座標系
文字記号:Xm、Ym、Zm
番号:5
名称(ロボットの運動):X、Y、Z軸方向の並進運動
文字記号:X、Y、Z / x、y、z
番号:6
名称(ロボットの運動):X、Y、Z軸周りの単独の回転運動
文字記号:A、B、C
参考
記号の使用例:
表1 及び 表2 で定めた図記号を組み合わせて産業用ロボットを表示した例を示す。
立体的表現を分かりやすくするために、座標系を付けることもある(例4、例6、例7)。
 例1.代表的な平面的表現(1)
例1.代表的な平面的表現(1)
 例2.代表的な平面的表現(2)
例2.代表的な平面的表現(2)
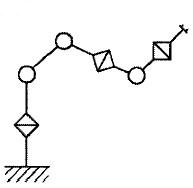
 例3.水平多関節ロボットの平面的表現
例3.水平多関節ロボットの平面的表現
 例4.水平多関節ロボットの立体的表現(座標系を付加)
例4.水平多関節ロボットの立体的表現(座標系を付加)
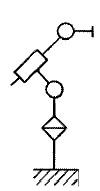
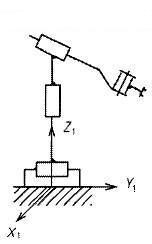
 例5.円筒座標ロボットの平面的表現
※手首の回転ジョイントは、表2の4を用いている。
例5.円筒座標ロボットの平面的表現
※手首の回転ジョイントは、表2の4を用いている。
 例6.円筒座標ロボットの立体的表現(座標系を付加)
※手首の回転ジョイントは、表2の5を用いなければならない。
例6.円筒座標ロボットの立体的表現(座標系を付加)
※手首の回転ジョイントは、表2の5を用いなければならない。
 例7.直角座標ロボット
※立体的表現が必要(座標系を付加)]]>
安全防護装置/安全防護領域/安全防護対策/トラブルシューティング
tag:rbt.jisw.com,2007://18.4008
2007-09-01T02:26:41Z
2007-09-01T02:27:56Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、安全防護装置/安全防護領域/安全防護対策/トラブルシューティング の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『安全防護装置』、『安全防護領域』、『安全防護対策』、『トラブルシューティング』のJIS規格における定義その他について。
安全防護装置』、『安全防護領域』、『安全防護対策』、『トラブルシューティング』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7130
用語: 安全防護装置
定義:
人を危険(※1)から守るために設けたガード(※2)又は装置。
対応英語(参考):
safeguard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7140
用語: 安全防護領域
定義:
安全防護装置によって囲まれた領域。
備考:
安全防護領域は制限領域(※3)を含む。
対応英語(参考):
safeguarded space
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7150
用語: 安全防護対策
定義:
ガード、装置及び安全作業手順(※4)を用いて人を保護する対策。
対応英語(参考):
safeguarding
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7160
用語: トラブルシューティング
定義:
ロボットシステム(※5)において意図した作業が行われないか、又は機能しなかった原因を系統的に見つけ出す行為。
対応英語(参考):
trouble shooting
ISOの項目番号(参考):
−
(※1)
危険とは、人に傷害を与えたり健康を害したりする恐れがある要因のことです。
(※2)
ガードとは、一般に、人を保護するために、特に用いられる機械構造物のことです。
ガードは、設置状況などによって、キャスティング、カバースクリーン、フェンス、ドア、囲い、バリアなどと呼ばれます。
(※3)
制限領域とは、最大領域の一部で、ロボットシステムにどんな故障・誤作動が生じても超えることがない限界を設定するリミット装置によって制限された領域のことです。
リミット装置が作動した後にロボットが動き得る最大距離も含まれます。
(※4)
安全作業手順とは、作業中に起こり得る傷害の可能性を減少させるために定められた作業手順のことです。
(※5)
ロボットシステムとは、次のものから構成されるシステムのことをいいます。
a)機械構造部(移動機能があればこれを含む。)
b)動力源及び制御装置
c)エンドエフェクタ
d)ロボットの作業遂行に必要な装置、機器及びセンサ
e)ロボット、装置、センサなどを運転し監視するための通信インタフェース。ただし、これらの周辺装置はロボット制御装置によって管理されるものに限定される。]]>
存在検知装置/安全運転速度/リスク/安全作業手順
tag:rbt.jisw.com,2007://18.4007
2007-09-01T02:25:17Z
2007-09-01T02:26:39Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、存在検知装置/安全運転速度/リスク/安全作業手順 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『存在検知装置』、『安全運転速度』、『リスク』、『安全作業手順』のJIS規格における定義その他について。
存在検知装置』、『安全運転速度』、『リスク』、『安全作業手順』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7090
用語: 存在検知装置
定義:
定められた平面又は空間への人の侵入を検知するための装置。
対応英語(参考):
presence sensing device
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7100
用語: 安全運転速度
定義:
ロボット供給者によって用意される唯一の選択速度であって、人がロボットの危険(※1)な動きから回避したり又はその動作を停止させたりするために、あらかじめ制限された速度。
対応英語(参考):
reduced speed
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7110
用語: リスク
定義:
傷害が起こる確率と傷害の度合いとの組合せ。
対応英語(参考):
risk
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7120
用語: 安全作業手順
定義:
作業中に起こり得る傷害の可能性を減少させるために定められた作業手順。
対応英語(参考):
sefe working procedure
ISOの項目番号(参考):
−
(※1)
危険とは、人に傷害を与えたり健康を害したりする恐れがある要因のことです。]]>
イネーブル装置/ガード/危険/ロックアウト・タグアウト
tag:rbt.jisw.com,2007://18.4006
2007-09-01T02:23:40Z
2007-09-01T02:25:11Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、イネーブル装置/ガード/危険/ロックアウト・タグアウト の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『イネーブル装置』、『ガード』、『危険』、『ロックアウト/タグアウト』のJIS規格における定義その他について。
イネーブル装置』、『ガード』、『危険』、『ロックアウト/タグアウト』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7050
用語: イネーブル装置
定義:
あらかじめ定められた動作位置に保持されている間に限り、ロボットの作動を可能にするための手動操作装置。
対応英語(参考):
enabling device
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7060
用語: ガード
定義:
人を保護するために、特に用いられる機械構造物。
備考:
ガードは、設置状況などによって、キャスティング、カバースクリーン、フェンス、ドア、囲い、バリアなどと呼ばれる。
対応英語(参考):
guard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7070
用語: 危険
定義:
人に傷害を与えたり健康を害したりする恐れがある要因。
対応英語(参考):
hazard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7080
用語: ロックアウト/タグアウト
定義:
エネルギー遮断装置の”開”又は”閉”の位置に固定具又は表札札を付けること。
備考:
ロックアウト/タグアウトを外すまで、エネルギー遮断装置又はその制御下にある周辺装置を操作してはならない。
対応英語(参考):
lockout/tagout
ISOの項目番号(参考):
−]]>
安全性/フェールセフ/オーバーラン/ホールドトゥランつまみ
tag:rbt.jisw.com,2007://18.4005
2007-08-31T16:16:02Z
2007-08-31T16:17:13Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、安全性/フェールセフ/オーバーラン/ホールドトゥランつまみ の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『安全性』、『フェールセフ』、『オーバーラン』、『ホールドトゥランつまみ』のJIS規格における定義その他について。
安全性』、『フェールセフ』、『オーバーラン』、『ホールドトゥランつまみ』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7010
用語: 安全性
定義:
人に傷害を与えないこと、又は人の健康を害さないこと。
対応英語(参考):
safety
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7020
用語: フェールセフ
定義:
ロボットシステム(※1)が故障した場合でも、安全性が確保できること。
対応英語(参考):
failsafe
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7030
用語: オーバーラン
定義:
制御装置の故障などによって、運動部分が設定されたポーズ(※2)又は経路(※3)を逸脱すること。
対応英語(参考):
overrun
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7040
用語: ホールドトゥランつまみ
定義:
人手で操作したときだけ動作し、離すと動作が停止する機能をもったつまみ。
対応英語(参考):
hold-to-run control
ISOの項目番号(参考):
−
(※1)
ロボットシステムとは、次のものから構成されるシステムのことをいいます。
a)機械構造部(移動機能があればこれを含む。)
b)動力源及び制御装置
c)エンドエフェクタ
d)ロボットの作業遂行に必要な装置、機器及びセンサ
e)ロボット、装置、センサなどを運転し監視するための通信インタフェース。ただし、これらの周辺装置はロボット制御装置によって管理されるものに限定される。
(※2)
ポーズとは、空間における位置及び姿勢のことです。
(※3)
経路とは、ポーズの順序集合のことです。]]>
サイクルタイム/標準サイクル/試験負荷/付加質量
tag:rbt.jisw.com,2007://18.4004
2007-08-31T16:14:33Z
2007-08-31T16:15:59Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、サイクルタイム/標準サイクル/試験負荷/付加質量 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『サイクルタイム』、『標準サイクル』、『試験負荷』、『付加質量』のJIS規格における定義その他について。
サイクルタイム』、『標準サイクル』、『試験負荷』、『付加質量』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6290
用語: サイクルタイム
定義:
サイクル(※1)を実行する所要時間。
対応英語(参考):
cycle time
ISOの項目番号(参考):
6.23
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6300
用語: 標準サイクル
定義:
標準とされるタスクプログラム(※2)実行の1回分。
対応英語(参考):
standard cycle
ISOの項目番号(参考):
6.24
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6310
用語: 試験負荷
定義:
ロボットの性能測定のためにメカニカルインタフェース(※3)に取り付ける質量負荷。(※4)
対応英語(参考):
test load
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6320
用語: 付加質量
定義:
メカニカルインタフェース以外の機械構造部(例えば、腕(※5))でロボットに加えて担うことができる質量。
対応英語(参考):
additional mass
ISOの項目番号(参考):
6.2.4
(※1)
サイクルとは、タスクプログラム実行の1回分のことです。
(※2)
タスクプログラムとは、ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラムのことです。
通常、タスクプログラムは、利用者が作成します。
タスクとは、アプリケーションの中の、ある限定された作業のことです。
(※3)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※4)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※5)
腕とは、一次軸ともいい、エンドエフェクタ(ロボットが作業対象に直接働きかける機能をもつ部分)の位置決めを目的としたリンク(一つの機械構造を構成する、互いに相対運動可能な固体要素)とジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)との相互結合体のことです。]]>
最短移動時間/静的コンプライアンス/最小変位/サイクル
tag:rbt.jisw.com,2007://18.4003
2007-08-31T16:13:20Z
2007-08-31T16:14:30Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、最短移動時間/静的コンプライアンス/最小変位/サイクル の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『最短移動時間』、『静的コンプライアンス』、『最小変位』、『サイクル』のJIS規格における定義その他について。
最短移動時間』、『静的コンプライアンス』、『最小変位』、『サイクル』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6250
用語: 最短移動時間
定義:
所定の状態から出発し、あらかじめ定められた距離(6次元量)を移動して所定の状態に到達するまでの最も短い所要時間(ポーズ安定化時間(※1)を含む。)。
対応英語(参考):
minimum posing time
ISOの項目番号(参考):
6.19
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6260
用語: 静的コンプライアンス
定義:
メカニカルインタフェース(※2)に加えられる単位負荷(※3)当たりの最大変位。
対応英語(参考):
static compliance
ISOの項目番号(参考):
6.20
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6270
用語: 最小変位
定義:
各軸(※4)ごと又はジョイント(※5)ごとに操作し得る最小の変位(直動又は回転)。
対応英語(参考):
resolution
ISOの項目番号(参考):
6.21
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6280
用語: サイクル
定義:
タスクプログラム(※6)実行の1回分。
対応英語(参考):
cycle
ISOの項目番号(参考):
6.22
(※1)
ポーズ安定化時間とは、ロボットが到達信号を発してから、メカニカルインタフェースの減衰運動が規定の限界内に収まるまでの時間のことです。
(※2)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※3)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※4)
軸とは、運動を直進又は回転モードで記述するときの各モード(ベクトル)の方向のことです。
なお、ロボットの能動ジョイントの意味にも使われます。
(※5)
ジョイントとは、二つのリンク(一つの機械構造を構成する、互いに相対運動可能な固体要素)が互いに接触して相対的に運動するときの連結部分のことです。
(※6)
タスクプログラムとは、ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラムのことです。
通常、タスクプログラムは、利用者が作成します。
タスクとは、アプリケーションの中の、ある限定された作業のことです。]]>
経路繰返し精度/経路速度精度/経路速度繰返し精度/経路速度変動
tag:rbt.jisw.com,2007://18.4002
2007-08-31T16:11:13Z
2007-08-31T16:13:17Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、経路繰返し精度/経路速度精度/経路速度繰返し精度/経路速度変動 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『経路繰返し精度』、『経路速度精度』、『経路速度繰返し精度』、『経路速度変動』のJIS規格における定義その他について。
経路繰返し精度』、『経路速度精度』、『経路速度繰返し精度』、『経路速度変動』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6210
用語: 経路繰返し精度
定義:
指令経路(※1)に沿って同じ向きに複数回動かしたときの実現経路のばらつき。
対応英語(参考):
path repeatability
ISOの項目番号(参考):
6.15
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6220
用語: 経路速度精度
定義:
指令経路に沿って指令速度で複数回動かしたときの実現経路速度(※2)の指令経路速度からの片寄り。
対応英語(参考):
path velocity accuracy
ISOの項目番号(参考):
6.16
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6230
用語: 経路速度繰返し精度
定義:
指令経路に沿って指令速度で複数回動かしたときの実現経路速度のばらつき。
対応英語(参考):
path velocity repeatability
ISOの項目番号(参考):
6.17
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6240
用語: 経路速度変動
定義:
指令経路に沿って指令速度で複数回動かして得られる各実現経路速度の最大両振幅の最大値と最小値との差の最大値。
対応英語(参考):
path velocity fluctuation
ISOの項目番号(参考):
6.18
(※1)
経路とは、ポーズ(空間における位置及び姿勢)の順序集合のことです。
(※2)
経路速度とは、経路に沿った速度のことです。]]>
ポーズ精度のドリフト/ポーズ繰返し精度のドリフト/経路精度
tag:rbt.jisw.com,2007://18.4001
2007-08-31T08:55:38Z
2007-08-31T08:56:47Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、ポーズ精度のドリフト/ポーズ繰返し精度のドリフト/経路精度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『ポーズ精度のドリフト』、『ポーズ繰返し精度のドリフト』、『経路精度』のJIS規格における定義その他について。
ポーズ精度のドリフト』、『ポーズ繰返し精度のドリフト』、『経路精度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6180
用語: ポーズ精度のドリフト
定義:
規定時間内におけるポーズ精度(※1)の変化。
備考:
これは規定時間内で一定時間ごとにポーズ精度を繰り返し測定するもので、一定のポーズ(※2)を規定の時間維持する間のポーズの変化を意味するものではない。
対応英語(参考):
drift of (uni-directional) pose accuracy
ISOの項目番号(参考):
6.12
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6190
用語: ポーズ繰返し精度のドリフト
定義:
規定時間内におけるポーズ繰返し精度(※3)の変化。
対応英語(参考):
drift of (uni-directional) pose repeatability
ISOの項目番号(参考):
6.13
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6200
用語: 経路精度
定義:
指令経路(※4)に沿って同じ向きに複数回、更に反対向きに複数回動かしたときの実現経路の指令経路からの片寄り。
対応英語(参考):
path accuracy
ISOの項目番号(参考):
6.14
(※1)
ポーズ精度とは、同じ指令ポーズに同じ方向から近づいたときの、実現ポーズの指令ポーズからの片寄りのことです。
(※2)
ポーズとは、空間における位置及び姿勢のことです。
(※3)
ポーズ繰返し精度とは、同じ指令ポーズに同じ方向から近づいたときの実現ポーズのばらつきのことです。
(※4)
経路とは、ポーズの順序集合のことです。]]>
距離繰返し精度/ポーズ安定化時間/ポーズ行過ぎ量
tag:rbt.jisw.com,2007://18.4000
2007-08-31T08:54:11Z
2007-08-31T08:55:36Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、距離繰返し精度/ポーズ安定化時間/ポーズ行過ぎ量 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『距離繰返し精度』、『ポーズ安定化時間』、『ポーズ行過ぎ量』のJIS規格における定義その他について。
距離繰返し精度』、『ポーズ安定化時間』、『ポーズ行過ぎ量』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6150
用語: 距離繰返し精度
定義:
指令された距離を同一のポーズ(※1)で同一の方向から移動したときの実現距離のばらつき。
対応英語(参考):
distance repeatability
ISOの項目番号(参考):
6.9
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6160
用語: ポーズ安定化時間
定義:
ロボットが到達信号を発してから、メカニカルインタフェース(※2)の減衰運動が規定の限界内に収まるまでの時間。
対応英語(参考):
pose stabilization time
ISOの項目番号(参考):
6.10
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6170
用語: ポーズ行過ぎ量
定義:
ロボットが到達信号を発した後の指令ポーズ(※3)と実現ポーズ(※4)との差の最大値。
対応英語(参考):
pose overshoot
ISOの項目番号(参考):
6.11
(※1)
ポーズとは、空間における位置及び姿勢のことです。
(※2)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※3)
指令ポーズとは、タスクプログラム(ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラム)によって指示されたポーズのことです。
(※4)
実現ポーズとは、指令ポーズに応答してロボットが実際に取るポーズのことです。]]>
ポーズ精度/ポーズ繰返し精度/多方向ポーズ戻り精度/距離精度
tag:rbt.jisw.com,2007://18.3999
2007-08-31T08:52:26Z
2007-08-31T08:54:06Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、ポーズ精度/ポーズ繰返し精度/多方向ポーズ戻り精度/距離精度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『ポーズ精度』、『ポーズ繰返し精度』、『多方向ポーズ戻り精度』、『距離精度』のJIS規格における定義その他について。
ポーズ精度』、『ポーズ繰返し精度』、『多方向ポーズ戻り精度』、『距離精度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6110
用語: ポーズ精度
定義:
同じ指令ポーズ(※1)に同じ方向から近づいたときの、実現ポーズ(※2)の指令ポーズからの片寄り。
対応英語(参考):
(uni-directional) pose accuracy
ISOの項目番号(参考):
6.5
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6120
用語: ポーズ繰返し精度
定義:
同じ指令ポーズに同じ方向から近づいたときの実現ポーズのばらつき。
対応英語(参考):
(uni-directional) pose repeatability
ISOの項目番号(参考):
6.6
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6130
用語: 多方向ポーズ戻り精度
定義:
同じ指令ポーズに直交する3軸方向から複数回近づけたときの各々の平均実現ポーズ間の最大距離。
対応英語(参考):
multi directional pose accuracy variation
ISOの項目番号(参考):
6.7
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6140
用語: 距離精度
定義:
指令された距離を同一のポーズ(※3)で同一の方向から移動したときの実現距離(6次元量)の指令距離からの片寄り。
対応英語(参考):
distance accuracy
ISOの項目番号(参考):
6.8
(※1)
指令ポーズとは、タスクプログラム(ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラム)によって指示されたポーズのことです。
(※2)
実現ポーズとは、指令ポーズに応答してロボットが実際に取るポーズのことです。
(※3)
ポーズとは、空間における位置及び姿勢のことです。]]>
最大モーメント負荷/単軸速度/経路速度/単軸加速度/経路加速度
tag:rbt.jisw.com,2007://18.3998
2007-08-31T08:50:54Z
2007-08-31T08:52:22Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、最大モーメント負荷/単軸速度/経路速度/単軸加速度/経路加速度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『最大モーメント負荷』、『単軸速度』、『経路速度』、『単軸加速度』、『経路加速度』のJIS規格における定義その他について。
最大モーメント負荷』、『単軸速度』、『経路速度』、『単軸加速度』、『経路加速度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6060
用語: 最大モーメント負荷
定義:
ロボットの機構に永久的損傷を与えることなくメカニカルインタフェース(※1)に連続して加え得るモーメント負荷(※2)(慣性項は含まない。)。
対応英語(参考):
maximum moment load
ISOの項目番号(参考):
6.2.6
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6070
用語: 単軸速度
定義:
単一の軸(※3)が動作したときの指定された点の速度。
対応英語(参考):
individual joint velocity,
axis velocity
ISOの項目番号(参考):
6.3.1
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6080
用語: 経路速度
定義:
経路(※4)に沿った速度。
対応英語(参考):
path velocity
ISOの項目番号(参考):
6.3.2
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6090
用語: 単軸加速度
定義:
単一の軸が動作したときの指定された点の加速度。
対応英語(参考):
individual joint acceleration,
axis acceleration
ISOの項目番号(参考):
6.4.1
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6100
用語: 経路加速度
定義:
経路に沿った加速度。
対応英語(参考):
path acceleration
ISOの項目番号(参考):
6.4.2
(※1)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※2)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※3)
軸とは、運動を直進又は回転モードで記述するときの各モード(ベクトル)の方向のことです。
なお、ロボットの能動ジョイントの意味にも使われます。
(※4)
経路とは、ポーズ(空間における位置及び姿勢)の順序集合のことです。]]>
テレイグジスタンス/テレプレゼンス
tag:rbt.jisw.com,2007://18.3997
2007-08-31T07:29:17Z
2007-08-31T07:30:35Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、テレイグジスタンス/テレプレゼンス の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『テレイグジスタンス』、『テレプレゼンス』のJIS規格における定義その他について。
テレイグジスタンス』、『テレプレゼンス』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250205
用語: テレイグジスタンス
定義:
ロボットを遠隔操作(※1)する際、ロボットの視覚(※2)や触覚(※3)で得られた実際の作業環境や作業対象物に関する情報を、操作者自身の感覚を通して、あたかもその作業環境にいて作業を実行しているように適切に提示すること。
対応英語(参考):
tele-existance
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250206
用語: テレプレゼンス
定義:
テレイグジスタンスと同義。
備考:
宇宙のように通信の時間遅れを無視できない遠隔地を主に想定している。
対応英語(参考):
tele-presence
(※1)
遠隔操作とは、離れた空間からロボットを操作することをいいます。
オペレータ(ロボット又はロボットシステムによって実施することが定められている動作を開始、監視及び停止できる者として認定された人)が遠隔の場所から操作することができるロボットのことを遠隔操作ロボットといいます。
(※2)
視覚とは、光学的情報に関する感覚のことです。
視覚を実現するためのセンサを、視覚センサといいます。
(※3)
触覚とは、ロボットと物体の接触に関する感覚。
触覚を実現するためのセンサを、触覚センサといいます。]]>
触覚ディスプレイ/ハプティクインタフェース
tag:rbt.jisw.com,2007://18.3996
2007-08-31T07:28:02Z
2007-08-31T07:29:13Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、触覚ディスプレイ/ハプティクインタフェース の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『触覚ディスプレイ』、『ハプティクインタフェース』のJIS規格における定義その他について。
触覚ディスプレイ』、『ハプティクインタフェース』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250203
用語: 触覚ディスプレイ
定義:
マトリックス触覚(※1)の情報を多数の発光素子の光やモニタ画像、振動ピンの配列などに変えて提示する装置。
対応英語(参考):
tactile display
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250204
用語: ハプティクインタフェース
定義:
接触機能を利用したインタフェース。
対応英語(参考):
haptic interface
(※1)
触覚とは、ロボットと物体の接触に関する感覚。
触覚を実現するためのセンサを、触覚センサといいます。]]>
バーチャルリアリティ/センサグローブ/ヘッドマウントディスプレイ
tag:rbt.jisw.com,2007://18.3995
2007-08-31T07:26:00Z
2007-08-31T07:27:23Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、バーチャルリアリティ/センサグローブ/ヘッドマウントディスプレイ の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『バーチャルリアリティ』、『センサグローブ』、『ヘッドマウントディスプレイ』のJIS規格における定義その他について。
バーチャルリアリティ』、『センサグローブ』、『ヘッドマウントディスプレイ』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250200
用語: バーチャルリアリティ
定義:
現実感を伴った仮想的な世界をコンピュータで作り出す技術。
仮想現実。
対応英語(参考):
vertual reality
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250201
用語: センサグローブ
定義:
手や指の動きを検出するための各種のセンサを搭載した装具。
対応英語(参考):
sensor glove
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250202
用語: ヘッドマウントディスプレイ
定義:
オペレータ(※1)の頭部に装着して立体画像を提示するとともに、頭部の動きを検出することのできる装置。
対応英語(参考):
head mount display/HMD
(※1)
オペレータとは、ロボット又はロボットシステムによって実施することが定められている動作を開始、監視及び停止できる者として認定された人のことです。]]>
例7.直角座標ロボット
※立体的表現が必要(座標系を付加)]]>
安全防護装置/安全防護領域/安全防護対策/トラブルシューティング
tag:rbt.jisw.com,2007://18.4008
2007-09-01T02:26:41Z
2007-09-01T02:27:56Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、安全防護装置/安全防護領域/安全防護対策/トラブルシューティング の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『安全防護装置』、『安全防護領域』、『安全防護対策』、『トラブルシューティング』のJIS規格における定義その他について。
安全防護装置』、『安全防護領域』、『安全防護対策』、『トラブルシューティング』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7130
用語: 安全防護装置
定義:
人を危険(※1)から守るために設けたガード(※2)又は装置。
対応英語(参考):
safeguard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7140
用語: 安全防護領域
定義:
安全防護装置によって囲まれた領域。
備考:
安全防護領域は制限領域(※3)を含む。
対応英語(参考):
safeguarded space
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7150
用語: 安全防護対策
定義:
ガード、装置及び安全作業手順(※4)を用いて人を保護する対策。
対応英語(参考):
safeguarding
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7160
用語: トラブルシューティング
定義:
ロボットシステム(※5)において意図した作業が行われないか、又は機能しなかった原因を系統的に見つけ出す行為。
対応英語(参考):
trouble shooting
ISOの項目番号(参考):
−
(※1)
危険とは、人に傷害を与えたり健康を害したりする恐れがある要因のことです。
(※2)
ガードとは、一般に、人を保護するために、特に用いられる機械構造物のことです。
ガードは、設置状況などによって、キャスティング、カバースクリーン、フェンス、ドア、囲い、バリアなどと呼ばれます。
(※3)
制限領域とは、最大領域の一部で、ロボットシステムにどんな故障・誤作動が生じても超えることがない限界を設定するリミット装置によって制限された領域のことです。
リミット装置が作動した後にロボットが動き得る最大距離も含まれます。
(※4)
安全作業手順とは、作業中に起こり得る傷害の可能性を減少させるために定められた作業手順のことです。
(※5)
ロボットシステムとは、次のものから構成されるシステムのことをいいます。
a)機械構造部(移動機能があればこれを含む。)
b)動力源及び制御装置
c)エンドエフェクタ
d)ロボットの作業遂行に必要な装置、機器及びセンサ
e)ロボット、装置、センサなどを運転し監視するための通信インタフェース。ただし、これらの周辺装置はロボット制御装置によって管理されるものに限定される。]]>
存在検知装置/安全運転速度/リスク/安全作業手順
tag:rbt.jisw.com,2007://18.4007
2007-09-01T02:25:17Z
2007-09-01T02:26:39Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、存在検知装置/安全運転速度/リスク/安全作業手順 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『存在検知装置』、『安全運転速度』、『リスク』、『安全作業手順』のJIS規格における定義その他について。
存在検知装置』、『安全運転速度』、『リスク』、『安全作業手順』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7090
用語: 存在検知装置
定義:
定められた平面又は空間への人の侵入を検知するための装置。
対応英語(参考):
presence sensing device
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7100
用語: 安全運転速度
定義:
ロボット供給者によって用意される唯一の選択速度であって、人がロボットの危険(※1)な動きから回避したり又はその動作を停止させたりするために、あらかじめ制限された速度。
対応英語(参考):
reduced speed
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7110
用語: リスク
定義:
傷害が起こる確率と傷害の度合いとの組合せ。
対応英語(参考):
risk
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7120
用語: 安全作業手順
定義:
作業中に起こり得る傷害の可能性を減少させるために定められた作業手順。
対応英語(参考):
sefe working procedure
ISOの項目番号(参考):
−
(※1)
危険とは、人に傷害を与えたり健康を害したりする恐れがある要因のことです。]]>
イネーブル装置/ガード/危険/ロックアウト・タグアウト
tag:rbt.jisw.com,2007://18.4006
2007-09-01T02:23:40Z
2007-09-01T02:25:11Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、イネーブル装置/ガード/危険/ロックアウト・タグアウト の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『イネーブル装置』、『ガード』、『危険』、『ロックアウト/タグアウト』のJIS規格における定義その他について。
イネーブル装置』、『ガード』、『危険』、『ロックアウト/タグアウト』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7050
用語: イネーブル装置
定義:
あらかじめ定められた動作位置に保持されている間に限り、ロボットの作動を可能にするための手動操作装置。
対応英語(参考):
enabling device
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7060
用語: ガード
定義:
人を保護するために、特に用いられる機械構造物。
備考:
ガードは、設置状況などによって、キャスティング、カバースクリーン、フェンス、ドア、囲い、バリアなどと呼ばれる。
対応英語(参考):
guard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7070
用語: 危険
定義:
人に傷害を与えたり健康を害したりする恐れがある要因。
対応英語(参考):
hazard
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7080
用語: ロックアウト/タグアウト
定義:
エネルギー遮断装置の”開”又は”閉”の位置に固定具又は表札札を付けること。
備考:
ロックアウト/タグアウトを外すまで、エネルギー遮断装置又はその制御下にある周辺装置を操作してはならない。
対応英語(参考):
lockout/tagout
ISOの項目番号(参考):
−]]>
安全性/フェールセフ/オーバーラン/ホールドトゥランつまみ
tag:rbt.jisw.com,2007://18.4005
2007-08-31T16:16:02Z
2007-08-31T16:17:13Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”g)安全性”に分類される用語である、安全性/フェールセフ/オーバーラン/ホールドトゥランつまみ の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”g)安全性”に分類されている用語のうち、『安全性』、『フェールセフ』、『オーバーラン』、『ホールドトゥランつまみ』のJIS規格における定義その他について。
安全性』、『フェールセフ』、『オーバーラン』、『ホールドトゥランつまみ』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【g)安全性】
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7010
用語: 安全性
定義:
人に傷害を与えないこと、又は人の健康を害さないこと。
対応英語(参考):
safety
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7020
用語: フェールセフ
定義:
ロボットシステム(※1)が故障した場合でも、安全性が確保できること。
対応英語(参考):
failsafe
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7030
用語: オーバーラン
定義:
制御装置の故障などによって、運動部分が設定されたポーズ(※2)又は経路(※3)を逸脱すること。
対応英語(参考):
overrun
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > g)安全性
番号: 7040
用語: ホールドトゥランつまみ
定義:
人手で操作したときだけ動作し、離すと動作が停止する機能をもったつまみ。
対応英語(参考):
hold-to-run control
ISOの項目番号(参考):
−
(※1)
ロボットシステムとは、次のものから構成されるシステムのことをいいます。
a)機械構造部(移動機能があればこれを含む。)
b)動力源及び制御装置
c)エンドエフェクタ
d)ロボットの作業遂行に必要な装置、機器及びセンサ
e)ロボット、装置、センサなどを運転し監視するための通信インタフェース。ただし、これらの周辺装置はロボット制御装置によって管理されるものに限定される。
(※2)
ポーズとは、空間における位置及び姿勢のことです。
(※3)
経路とは、ポーズの順序集合のことです。]]>
サイクルタイム/標準サイクル/試験負荷/付加質量
tag:rbt.jisw.com,2007://18.4004
2007-08-31T16:14:33Z
2007-08-31T16:15:59Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、サイクルタイム/標準サイクル/試験負荷/付加質量 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『サイクルタイム』、『標準サイクル』、『試験負荷』、『付加質量』のJIS規格における定義その他について。
サイクルタイム』、『標準サイクル』、『試験負荷』、『付加質量』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6290
用語: サイクルタイム
定義:
サイクル(※1)を実行する所要時間。
対応英語(参考):
cycle time
ISOの項目番号(参考):
6.23
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6300
用語: 標準サイクル
定義:
標準とされるタスクプログラム(※2)実行の1回分。
対応英語(参考):
standard cycle
ISOの項目番号(参考):
6.24
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6310
用語: 試験負荷
定義:
ロボットの性能測定のためにメカニカルインタフェース(※3)に取り付ける質量負荷。(※4)
対応英語(参考):
test load
ISOの項目番号(参考):
−
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6320
用語: 付加質量
定義:
メカニカルインタフェース以外の機械構造部(例えば、腕(※5))でロボットに加えて担うことができる質量。
対応英語(参考):
additional mass
ISOの項目番号(参考):
6.2.4
(※1)
サイクルとは、タスクプログラム実行の1回分のことです。
(※2)
タスクプログラムとは、ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラムのことです。
通常、タスクプログラムは、利用者が作成します。
タスクとは、アプリケーションの中の、ある限定された作業のことです。
(※3)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※4)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※5)
腕とは、一次軸ともいい、エンドエフェクタ(ロボットが作業対象に直接働きかける機能をもつ部分)の位置決めを目的としたリンク(一つの機械構造を構成する、互いに相対運動可能な固体要素)とジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)との相互結合体のことです。]]>
最短移動時間/静的コンプライアンス/最小変位/サイクル
tag:rbt.jisw.com,2007://18.4003
2007-08-31T16:13:20Z
2007-08-31T16:14:30Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、最短移動時間/静的コンプライアンス/最小変位/サイクル の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『最短移動時間』、『静的コンプライアンス』、『最小変位』、『サイクル』のJIS規格における定義その他について。
最短移動時間』、『静的コンプライアンス』、『最小変位』、『サイクル』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6250
用語: 最短移動時間
定義:
所定の状態から出発し、あらかじめ定められた距離(6次元量)を移動して所定の状態に到達するまでの最も短い所要時間(ポーズ安定化時間(※1)を含む。)。
対応英語(参考):
minimum posing time
ISOの項目番号(参考):
6.19
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6260
用語: 静的コンプライアンス
定義:
メカニカルインタフェース(※2)に加えられる単位負荷(※3)当たりの最大変位。
対応英語(参考):
static compliance
ISOの項目番号(参考):
6.20
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6270
用語: 最小変位
定義:
各軸(※4)ごと又はジョイント(※5)ごとに操作し得る最小の変位(直動又は回転)。
対応英語(参考):
resolution
ISOの項目番号(参考):
6.21
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6280
用語: サイクル
定義:
タスクプログラム(※6)実行の1回分。
対応英語(参考):
cycle
ISOの項目番号(参考):
6.22
(※1)
ポーズ安定化時間とは、ロボットが到達信号を発してから、メカニカルインタフェースの減衰運動が規定の限界内に収まるまでの時間のことです。
(※2)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※3)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※4)
軸とは、運動を直進又は回転モードで記述するときの各モード(ベクトル)の方向のことです。
なお、ロボットの能動ジョイントの意味にも使われます。
(※5)
ジョイントとは、二つのリンク(一つの機械構造を構成する、互いに相対運動可能な固体要素)が互いに接触して相対的に運動するときの連結部分のことです。
(※6)
タスクプログラムとは、ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラムのことです。
通常、タスクプログラムは、利用者が作成します。
タスクとは、アプリケーションの中の、ある限定された作業のことです。]]>
経路繰返し精度/経路速度精度/経路速度繰返し精度/経路速度変動
tag:rbt.jisw.com,2007://18.4002
2007-08-31T16:11:13Z
2007-08-31T16:13:17Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、経路繰返し精度/経路速度精度/経路速度繰返し精度/経路速度変動 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『経路繰返し精度』、『経路速度精度』、『経路速度繰返し精度』、『経路速度変動』のJIS規格における定義その他について。
経路繰返し精度』、『経路速度精度』、『経路速度繰返し精度』、『経路速度変動』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6210
用語: 経路繰返し精度
定義:
指令経路(※1)に沿って同じ向きに複数回動かしたときの実現経路のばらつき。
対応英語(参考):
path repeatability
ISOの項目番号(参考):
6.15
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6220
用語: 経路速度精度
定義:
指令経路に沿って指令速度で複数回動かしたときの実現経路速度(※2)の指令経路速度からの片寄り。
対応英語(参考):
path velocity accuracy
ISOの項目番号(参考):
6.16
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6230
用語: 経路速度繰返し精度
定義:
指令経路に沿って指令速度で複数回動かしたときの実現経路速度のばらつき。
対応英語(参考):
path velocity repeatability
ISOの項目番号(参考):
6.17
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6240
用語: 経路速度変動
定義:
指令経路に沿って指令速度で複数回動かして得られる各実現経路速度の最大両振幅の最大値と最小値との差の最大値。
対応英語(参考):
path velocity fluctuation
ISOの項目番号(参考):
6.18
(※1)
経路とは、ポーズ(空間における位置及び姿勢)の順序集合のことです。
(※2)
経路速度とは、経路に沿った速度のことです。]]>
ポーズ精度のドリフト/ポーズ繰返し精度のドリフト/経路精度
tag:rbt.jisw.com,2007://18.4001
2007-08-31T08:55:38Z
2007-08-31T08:56:47Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、ポーズ精度のドリフト/ポーズ繰返し精度のドリフト/経路精度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『ポーズ精度のドリフト』、『ポーズ繰返し精度のドリフト』、『経路精度』のJIS規格における定義その他について。
ポーズ精度のドリフト』、『ポーズ繰返し精度のドリフト』、『経路精度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6180
用語: ポーズ精度のドリフト
定義:
規定時間内におけるポーズ精度(※1)の変化。
備考:
これは規定時間内で一定時間ごとにポーズ精度を繰り返し測定するもので、一定のポーズ(※2)を規定の時間維持する間のポーズの変化を意味するものではない。
対応英語(参考):
drift of (uni-directional) pose accuracy
ISOの項目番号(参考):
6.12
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6190
用語: ポーズ繰返し精度のドリフト
定義:
規定時間内におけるポーズ繰返し精度(※3)の変化。
対応英語(参考):
drift of (uni-directional) pose repeatability
ISOの項目番号(参考):
6.13
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6200
用語: 経路精度
定義:
指令経路(※4)に沿って同じ向きに複数回、更に反対向きに複数回動かしたときの実現経路の指令経路からの片寄り。
対応英語(参考):
path accuracy
ISOの項目番号(参考):
6.14
(※1)
ポーズ精度とは、同じ指令ポーズに同じ方向から近づいたときの、実現ポーズの指令ポーズからの片寄りのことです。
(※2)
ポーズとは、空間における位置及び姿勢のことです。
(※3)
ポーズ繰返し精度とは、同じ指令ポーズに同じ方向から近づいたときの実現ポーズのばらつきのことです。
(※4)
経路とは、ポーズの順序集合のことです。]]>
距離繰返し精度/ポーズ安定化時間/ポーズ行過ぎ量
tag:rbt.jisw.com,2007://18.4000
2007-08-31T08:54:11Z
2007-08-31T08:55:36Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、距離繰返し精度/ポーズ安定化時間/ポーズ行過ぎ量 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『距離繰返し精度』、『ポーズ安定化時間』、『ポーズ行過ぎ量』のJIS規格における定義その他について。
距離繰返し精度』、『ポーズ安定化時間』、『ポーズ行過ぎ量』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6150
用語: 距離繰返し精度
定義:
指令された距離を同一のポーズ(※1)で同一の方向から移動したときの実現距離のばらつき。
対応英語(参考):
distance repeatability
ISOの項目番号(参考):
6.9
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6160
用語: ポーズ安定化時間
定義:
ロボットが到達信号を発してから、メカニカルインタフェース(※2)の減衰運動が規定の限界内に収まるまでの時間。
対応英語(参考):
pose stabilization time
ISOの項目番号(参考):
6.10
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6170
用語: ポーズ行過ぎ量
定義:
ロボットが到達信号を発した後の指令ポーズ(※3)と実現ポーズ(※4)との差の最大値。
対応英語(参考):
pose overshoot
ISOの項目番号(参考):
6.11
(※1)
ポーズとは、空間における位置及び姿勢のことです。
(※2)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※3)
指令ポーズとは、タスクプログラム(ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラム)によって指示されたポーズのことです。
(※4)
実現ポーズとは、指令ポーズに応答してロボットが実際に取るポーズのことです。]]>
ポーズ精度/ポーズ繰返し精度/多方向ポーズ戻り精度/距離精度
tag:rbt.jisw.com,2007://18.3999
2007-08-31T08:52:26Z
2007-08-31T08:54:06Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、ポーズ精度/ポーズ繰返し精度/多方向ポーズ戻り精度/距離精度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『ポーズ精度』、『ポーズ繰返し精度』、『多方向ポーズ戻り精度』、『距離精度』のJIS規格における定義その他について。
ポーズ精度』、『ポーズ繰返し精度』、『多方向ポーズ戻り精度』、『距離精度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6110
用語: ポーズ精度
定義:
同じ指令ポーズ(※1)に同じ方向から近づいたときの、実現ポーズ(※2)の指令ポーズからの片寄り。
対応英語(参考):
(uni-directional) pose accuracy
ISOの項目番号(参考):
6.5
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6120
用語: ポーズ繰返し精度
定義:
同じ指令ポーズに同じ方向から近づいたときの実現ポーズのばらつき。
対応英語(参考):
(uni-directional) pose repeatability
ISOの項目番号(参考):
6.6
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6130
用語: 多方向ポーズ戻り精度
定義:
同じ指令ポーズに直交する3軸方向から複数回近づけたときの各々の平均実現ポーズ間の最大距離。
対応英語(参考):
multi directional pose accuracy variation
ISOの項目番号(参考):
6.7
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6140
用語: 距離精度
定義:
指令された距離を同一のポーズ(※3)で同一の方向から移動したときの実現距離(6次元量)の指令距離からの片寄り。
対応英語(参考):
distance accuracy
ISOの項目番号(参考):
6.8
(※1)
指令ポーズとは、タスクプログラム(ロボットシステムに作業を実行させる手順、動作、条件などを指示するプログラム)によって指示されたポーズのことです。
(※2)
実現ポーズとは、指令ポーズに応答してロボットが実際に取るポーズのことです。
(※3)
ポーズとは、空間における位置及び姿勢のことです。]]>
最大モーメント負荷/単軸速度/経路速度/単軸加速度/経路加速度
tag:rbt.jisw.com,2007://18.3998
2007-08-31T08:50:54Z
2007-08-31T08:52:22Z
産業用マニピュレーティングロボット用語(JIS B 0134)において、”f)性能”に分類される用語である、最大モーメント負荷/単軸速度/経路速度/単軸加速度/経路加速度 の定義、補足など。
jisw
http://www.jisw.com/
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”f)性能”に分類されている用語のうち、『最大モーメント負荷』、『単軸速度』、『経路速度』、『単軸加速度』、『経路加速度』のJIS規格における定義その他について。
最大モーメント負荷』、『単軸速度』、『経路速度』、『単軸加速度』、『経路加速度』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【f)性能】
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6060
用語: 最大モーメント負荷
定義:
ロボットの機構に永久的損傷を与えることなくメカニカルインタフェース(※1)に連続して加え得るモーメント負荷(※2)(慣性項は含まない。)。
対応英語(参考):
maximum moment load
ISOの項目番号(参考):
6.2.6
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6070
用語: 単軸速度
定義:
単一の軸(※3)が動作したときの指定された点の速度。
対応英語(参考):
individual joint velocity,
axis velocity
ISOの項目番号(参考):
6.3.1
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6080
用語: 経路速度
定義:
経路(※4)に沿った速度。
対応英語(参考):
path velocity
ISOの項目番号(参考):
6.3.2
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6090
用語: 単軸加速度
定義:
単一の軸が動作したときの指定された点の加速度。
対応英語(参考):
individual joint acceleration,
axis acceleration
ISOの項目番号(参考):
6.4.1
分類: 産業用マニピュレーティングロボット用語 > f)性能
番号: 6100
用語: 経路加速度
定義:
経路に沿った加速度。
対応英語(参考):
path acceleration
ISOの項目番号(参考):
6.4.2
(※1)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。
(※2)
負荷とは、ロボットが支持する質量、慣性モーメント、静的力及び動的力の総称のことです。
(※3)
軸とは、運動を直進又は回転モードで記述するときの各モード(ベクトル)の方向のことです。
なお、ロボットの能動ジョイントの意味にも使われます。
(※4)
経路とは、ポーズ(空間における位置及び姿勢)の順序集合のことです。]]>
テレイグジスタンス/テレプレゼンス
tag:rbt.jisw.com,2007://18.3997
2007-08-31T07:29:17Z
2007-08-31T07:30:35Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、テレイグジスタンス/テレプレゼンス の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『テレイグジスタンス』、『テレプレゼンス』のJIS規格における定義その他について。
テレイグジスタンス』、『テレプレゼンス』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250205
用語: テレイグジスタンス
定義:
ロボットを遠隔操作(※1)する際、ロボットの視覚(※2)や触覚(※3)で得られた実際の作業環境や作業対象物に関する情報を、操作者自身の感覚を通して、あたかもその作業環境にいて作業を実行しているように適切に提示すること。
対応英語(参考):
tele-existance
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250206
用語: テレプレゼンス
定義:
テレイグジスタンスと同義。
備考:
宇宙のように通信の時間遅れを無視できない遠隔地を主に想定している。
対応英語(参考):
tele-presence
(※1)
遠隔操作とは、離れた空間からロボットを操作することをいいます。
オペレータ(ロボット又はロボットシステムによって実施することが定められている動作を開始、監視及び停止できる者として認定された人)が遠隔の場所から操作することができるロボットのことを遠隔操作ロボットといいます。
(※2)
視覚とは、光学的情報に関する感覚のことです。
視覚を実現するためのセンサを、視覚センサといいます。
(※3)
触覚とは、ロボットと物体の接触に関する感覚。
触覚を実現するためのセンサを、触覚センサといいます。]]>
触覚ディスプレイ/ハプティクインタフェース
tag:rbt.jisw.com,2007://18.3996
2007-08-31T07:28:02Z
2007-08-31T07:29:13Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、触覚ディスプレイ/ハプティクインタフェース の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『触覚ディスプレイ』、『ハプティクインタフェース』のJIS規格における定義その他について。
触覚ディスプレイ』、『ハプティクインタフェース』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250203
用語: 触覚ディスプレイ
定義:
マトリックス触覚(※1)の情報を多数の発光素子の光やモニタ画像、振動ピンの配列などに変えて提示する装置。
対応英語(参考):
tactile display
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250204
用語: ハプティクインタフェース
定義:
接触機能を利用したインタフェース。
対応英語(参考):
haptic interface
(※1)
触覚とは、ロボットと物体の接触に関する感覚。
触覚を実現するためのセンサを、触覚センサといいます。]]>
バーチャルリアリティ/センサグローブ/ヘッドマウントディスプレイ
tag:rbt.jisw.com,2007://18.3995
2007-08-31T07:26:00Z
2007-08-31T07:27:23Z
知能ロボット用語(JIS B 0185)において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類される用語である、バーチャルリアリティ/センサグローブ/ヘッドマウントディスプレイ の定義、補足など。
jisw
http://www.jisw.com/
知能ロボットに関連する用語を規定している知能ロボット用語において、”b)センシングパス関連用語”の分類の中で、”6)オペレーション”に分類されている用語のうち、『バーチャルリアリティ』、『センサグローブ』、『ヘッドマウントディスプレイ』のJIS規格における定義その他について。
バーチャルリアリティ』、『センサグローブ』、『ヘッドマウントディスプレイ』などの用語が定義されています。
知能ロボット用語(JIS B 0185)
⇒【b)センシングパス関連用語 > 6)オペレーション】
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250200
用語: バーチャルリアリティ
定義:
現実感を伴った仮想的な世界をコンピュータで作り出す技術。
仮想現実。
対応英語(参考):
vertual reality
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250201
用語: センサグローブ
定義:
手や指の動きを検出するための各種のセンサを搭載した装具。
対応英語(参考):
sensor glove
分類: 知能ロボット用語 > b)センシングパス関連用語 > 6)オペレーション
番号: 250202
用語: ヘッドマウントディスプレイ
定義:
オペレータ(※1)の頭部に装着して立体画像を提示するとともに、頭部の動きを検出することのできる装置。
対応英語(参考):
head mount display/HMD
(※1)
オペレータとは、ロボット又はロボットシステムによって実施することが定められている動作を開始、監視及び停止できる者として認定された人のことです。]]>