ローテーションリピート/プログラム最適化/生産管理データ
電子部品実装ロボットに関連する用語を規定している電子部品実装ロボット用語において、”d)特性・機能”に分類されている用語のうち、『ローテーションリピート』、『プログラム最適化』、『生産管理データ』のJIS規格における定義その他について。
電子部品をプリント配線板の所定の位置に挿入又は装着するロボットである電子部品実装ロボットの、機械構成、制御、特性・機能、安全性、関連装置などに関連する用語として、電子部品実装ロボット用語(JIS B 0144)において、”d)特性・機能”に分類されている電子部品実装ロボット用語には、以下の、『ローテーションリピート』、『プログラム最適化』、『生産管理データ』などの用語が定義されています。
電子部品実装ロボット用語(JIS B 0144)
⇒【d)特性・機能】
分類: 電子部品実装ロボット用語 > d)特性・機能
番号: 4320
用語: ローテーションリピート(※1)
定義:
多数個取りプリント配線板において、実装ブロックごとに座標を回転させて実装していく機能。
対応英語(参考):
rotation repeating
分類: 電子部品実装ロボット用語 > d)特性・機能
番号: 4330
用語: プログラム最適化
定義:
実装順序などを変更することによって生産性を向上すること。
対応英語(参考):
program optimization
分類: 電子部品実装ロボット用語 > d)特性・機能
番号: 4340
用語: 生産管理データ
定義:
稼働率(※2)など、生産実績を表すデータ。
対応英語(参考):
production management data
(※1)
電子部品実装ロボットの機能を表す記号として、ローテーションリピートを表す記号は以下になります。
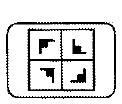
ローテーションリピート
(※2)
稼働率とは、実装ロボットが実際に生産を行った時間比率のことです。
[ ロボット > 電子部品実装ロボット ]