振り子ロボット/スパインロボット/パラレルロボット
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.2)特殊形式”に分類されている用語のうち、『振り子ロボット』、『スパインロボット』、『パラレルロボット』のJIS規格における定義その他について。
学習用ロボット(学習制御ロボット)、知能ロボット、移動ロボット、溶接ロボット等の産業用ロボットの種類・名称、産業用ロボットの形式、機械構造、運動学、プログラム・制御、ロボット言語、性能、安全性などに関連する用語として、産業用マニピュレーティングロボット用語(JIS B 0134)において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.2)特殊形式”に分類されている産業用ロボット用語には、以下の、『振り子ロボット』、『スパインロボット』、『パラレルロボット』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式】
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式
番号: 2223
用語: 振り子ロボット(※1)
定義:
腕(※2)の機械構造が、ユニバーサルジョイントで旋回する部分を含む極座標ロボット。(※3)
対応英語(参考):
pendular robot
ISOの項目番号(参考):
3.15.4
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式
番号: 2224
用語: スパインロボット
定義:
腕が、二つ又は三つの球ジョイント(※4)で構成されているロボット。
対応英語(参考):
spine robot
ISOの項目番号(参考):
3.15.7
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式
番号: 2225
用語: パラレルロボット
定義:
ベース(※5)とメカニカルインタフェース(※6)との間の機械構造に複数の動力伝達経路をもつロボット。
対応英語(参考):
parallel robot
ISOの項目番号(参考):
3.15.8
(※1)
振り子ロボットの参考図は以下になります。
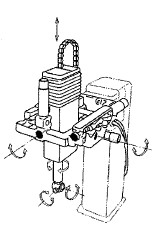
振り子ロボット
(※2)
腕とは、一次軸ともいい、エンドエフェクタの位置決めを目的としたリンクとジョイントとの相互結合体のことです。
(※3)
極座標ロボットとは、腕の機械構造が、二つの回転ジョイントと一つの直進ジョイントをもち、それらが極座標形式であるロボットのことです(以下の参考図参照)。
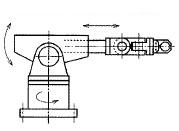
極座標ロボット
(※4)
球ジョイントとは、1点で交わる独立な3軸回りの回転運動を行うジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)のことです。
(※5)
ベースとは、環境に固定する、ロボットの部分のことです。
(※6)
メカニカルインタフェースとは、多ジョイント構造(リンクとジョイントとを組み合わせて、腕及び手首を構成している構造)の先端に設定されたエンドエフェクタ(把持部、ナット締め具、溶接ガン、スプレーガンなど、ロボットが作業対象に直接働きかける機能をもつ部分)の取付面のことです。