スカラロボット/ガントリロボット
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.2)特殊形式”に分類されている用語のうち、『スカラロボット』、『ガントリロボット』のJIS規格における定義その他について。
学習用ロボット(学習制御ロボット)、知能ロボット、移動ロボット、溶接ロボット等の産業用ロボットの種類・名称、産業用ロボットの形式、機械構造、運動学、プログラム・制御、ロボット言語、性能、安全性などに関連する用語として、産業用マニピュレーティングロボット用語(JIS B 0134)において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.2)特殊形式”に分類されている産業用ロボット用語には、以下の、『スカラロボット』、『ガントリロボット』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式】
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式
番号: 2221
用語: スカラロボット
定義:
腕(※1)の機械構造が、平行軸の回転ジョイント(※2)をもち、軸に直交する平面内にコンプライアンス(※3)をもつロボット。
対応英語(参考):
SCARA robot
ISOの項目番号(参考):
3.15.6
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.2)特殊形式
番号: 2222
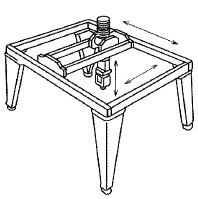
用語: ガントリロボット
定義:
腕の機械構造が、ガントリを含む直角座標ロボット。(※4)
備考:
ガントリとは、門型の架構をいう。
対応英語(参考):
gantry robot
ISOの項目番号(参考):
−
(※1)
腕とは、一次軸ともいい、エンドエフェクタの位置決めを目的としたリンクとジョイントとの相互結合体のことです。
(※2)
回転ジョイントとは、回転運動するジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)のことです。
(※3)
コンプライアンスとは、ロボットやそれに付随する工具などの振舞いが、外部からの作用に対して柔軟に対応することをいいます。
それらの動きがセンサフィードバックによる場合は動的コンプライアンス、そうでない場合は静的コンプライアンスとなります。
(※4)
直角座標ロボットとは、腕の機械構造が、三つの直進ジョイント(直進運動するジョイント)をもち、それらが直角座標形式であるロボットのことです(以下の参考図参照)。
直角座標ロボット