直角座標ロボット/円筒座標ロボット/極座標ロボット/関節ロボット
産業用ロボットに関連する用語を規定している産業用マニピュレーティングロボット用語において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.1)基本形式”に分類されている用語のうち、『直角座標ロボット』、『円筒座標ロボット』、『極座標ロボット』、『関節ロボット』のJIS規格における定義その他について。
学習用ロボット(学習制御ロボット)、知能ロボット、移動ロボット、溶接ロボット等の産業用ロボットの種類・名称、産業用ロボットの形式、機械構造、運動学、プログラム・制御、ロボット言語、性能、安全性などに関連する用語として、産業用マニピュレーティングロボット用語(JIS B 0134)において、”b)ロボットの分類”の分類の中で、”2)機械構造形式 > 2.1)基本形式”に分類されている産業用ロボット用語には、以下の、『直角座標ロボット』、『円筒座標ロボット』、『極座標ロボット』、『関節ロボット』などの用語が定義されています。
産業用マニピュレーティングロボット用語(JIS B 0134)
⇒【b)ロボットの分類 > 2)機械構造形式 > 2.1)基本形式】
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.1)基本形式
番号: 2211
用語: 直角座標ロボット(※1)
定義:
腕(※5)の機械構造が、三つの直進ジョイント(※6)をもち、それらが直角座標形式であるロボット。
対応英語(参考):
rectangular robot,
Cartesian robot
ISOの項目番号(参考):
3.15.1
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.1)基本形式
番号: 2212
用語: 円筒座標ロボット(※2)
定義:
腕の機械構造が、少なくとも一つの回転ジョイント(※7)と一つの直進ジョイントをもち、それらが円筒座標形式であるロボット。
対応英語(参考):
cylindrical robot
ISOの項目番号(参考):
3.15.2
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.1)基本形式
番号: 2213
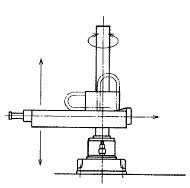
用語: 極座標ロボット(※3)
定義:
腕の機械構造が、二つの回転ジョイントと一つの直進ジョイントをもち、それらが極座標形式であるロボット。
対応英語(参考):
polar robot,
spherical robot
ISOの項目番号(参考):
3.15.3
分類: 産業用マニピュレーティングロボット用語 > b)ロボットの分類 > 2)機械構造形式 > 2.1)基本形式
番号: 2214
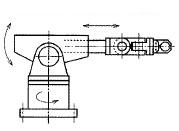
用語: 関節ロボット(※4)
定義:
腕の機械構造が、三以上の回転ジョイントで構成されているロボット。
対応英語(参考):
anthropomorphic robot,
articulated robot
ISOの項目番号(参考):
3.15.5
(※1)
直角座標ロボットの参考図は以下になります。
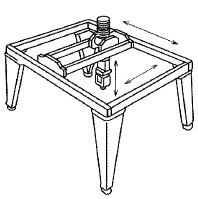
直角座標ロボット
(※2)
円筒座標ロボットの参考図は以下になります。
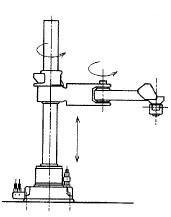
円筒座標ロボット
(※3)
極座標ロボットの参考図は以下になります。
極座標ロボット
(※4)
関節ロボットの参考図は以下になります。
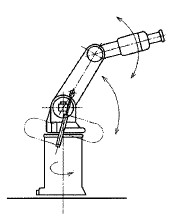
関節ロボット
(※5)
腕とは、一次軸ともいい、エンドエフェクタの位置決めを目的としたリンクとジョイントとの相互結合体のことです。
(※6)
直進ジョイントとは、直進運動するジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)のことです。
(※7)
回転ジョイントとは、回転運動するジョイント(二つのリンクが互いに接触して相対的に運動するときの連結部分)のことです。