図記号
産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号について規定しているJIS規格には、”JIS B 0138 産業用ロボット-図記号”があります。
その適用範囲、分類、記号(図記号)については以下の通りになります。
学習用ロボット(学習制御ロボット)、知能ロボット、移動ロボット、溶接ロボット等の産業用ロボットに関連する図記号について。
【 産業用ロボット-図記号(JIS B 0138) 】
1.適用範囲
この規格は、産業用ロボットに関して用いる機構を表す図記号及びこれに関連した記号について規定する。
2.分類
分類は、次による。
(1)図記号表示の基本
(2)機構を表す図記号
(3)座標系に関する文字記号
3.記号
3.1 図記号
図記号は、表1 及び 表2によるほか、次による。
(1)図記号は、図を読み取るために明りょう、かつ、読みやすい大きさで表示する。
(2)この規格に規定していない機器又はシステムは、これらの記号を組み合わせて表示することができる。
3.2 座標系に関する文字記号
座標系に関する文字記号は、表3 による。
表1 図記号表示の基本(以下の番号1〜6)
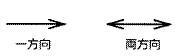
番号:1
名称:直進の方向
図記号:(以下)
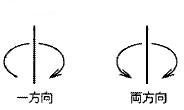
番号:2
名称:回転の方向
図記号:(以下)
番号:3
名称:ジョイント軸、バー(リンク)
図記号:(以下)
![]()
番号:4
名称:リンクの固定結合
図記号:(以下)

番号:5
名称:設置基準面
図記号:(以下)

番号:6
名称:メカニカルインタフェース
図記号:(以下)

表2 機構を表す図記号(以下の番号1〜8)
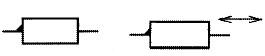
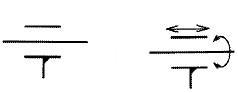
番号:1
名称:直進ジョイント(1)
自由度:1
図記号と運動の方向:(以下)
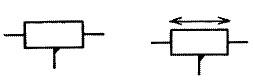
番号:2
名称:直進ジョイント(2)
自由度:1
図記号と運動の方向:(以下)
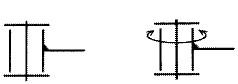
番号:3
名称:回転ジョイント(1)
自由度:1
図記号と運動の方向:(以下)

番号:4
名称:回転ジョイント(2)(平面)
自由度:1
図記号と運動の方向:(以下)

番号:5
名称:回転ジョイント(2)(立体)
自由度:1
図記号と運動の方向:(以下)
番号:6
名称:円筒ジョイント
自由度:2
図記号と運動の方向:(以下)
番号:7
名称:球ジョイント
自由度:3
図記号と運動の方向:(以下)

番号:8
名称:エンドエフェクタ
自由度:−
図記号:(以下)

表3 座標系に関する文字記号(以下の番号1〜6)
番号:1
名称(座標系):座標系(一般的表示)
文字記号:X、Y、Z
番号2
名称(座標系):ワールド座標系
文字記号:X0、Y0、Z0
番号:3
名称(座標系):ベース座標系
文字記号:X1、Y1、Z1
番号:4
名称(座標系):メカニカルインタフェース座標系
文字記号:Xm、Ym、Zm
番号:5
名称(ロボットの運動):X、Y、Z軸方向の並進運動
文字記号:X、Y、Z / x、y、z
番号:6
名称(ロボットの運動):X、Y、Z軸周りの単独の回転運動
文字記号:A、B、C
参考
記号の使用例:
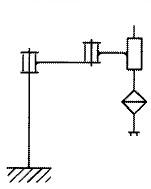
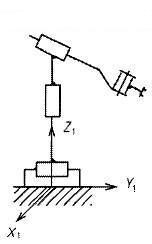
表1 及び 表2 で定めた図記号を組み合わせて産業用ロボットを表示した例を示す。
立体的表現を分かりやすくするために、座標系を付けることもある(例4、例6、例7)。
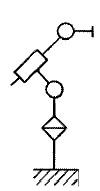
例1.代表的な平面的表現(1)
例2.代表的な平面的表現(2)
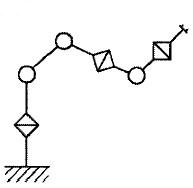
例3.水平多関節ロボットの平面的表現
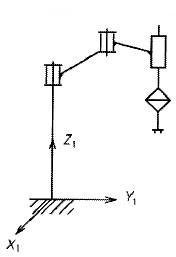
例4.水平多関節ロボットの立体的表現(座標系を付加)
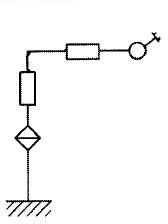
例5.円筒座標ロボットの平面的表現
※手首の回転ジョイントは、表2の4を用いている。
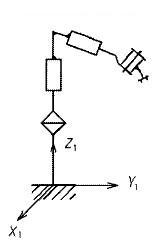
例6.円筒座標ロボットの立体的表現(座標系を付加)
※手首の回転ジョイントは、表2の5を用いなければならない。
例7.直角座標ロボット
※立体的表現が必要(座標系を付加)